MICA: Mixed Initiative Control of Automateams
MICA was a DARPA sponsored program to apply merged control theoretic and human-machine interaction concepts to principally aerial autonomous vehicles.
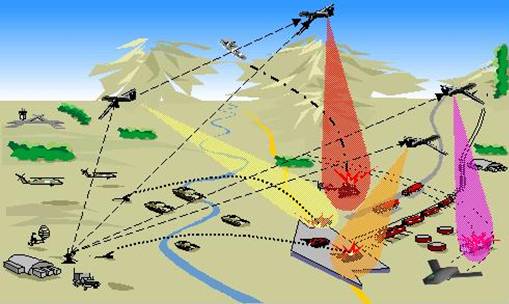
Mixed Initiative Control of Automa-Teams (MICA) was a DARPA sponsored program to apply merged control theoretic and human-machine interaction concepts to principally aerial autonomous vehicles. SIFT had subcontracts with two different MICA primes, Cornell and Honeywell. Under this effort, SIFT extended and deepened the Playbook(R) approach, including development of an ontology and task representation for interactions in Playbook, a rudimentary task-authoring tool, development of a new UI that allowed specification of plays through goal statements and constraint stipulations, and experimental validation of the value of the Playbook approach (as compared to mode selection or manual control). In addition, SIFT explored the application of Kirlik's notions of Markov Decision Process (MDP) models of mixed interaction as a design tool, both statically (pre-mission) and dynamically (run-time adaptive tool).