TUSC: Testbed for UAV Supervisory Control
The goal of TUSC was to integrate a Playbook into a multi-UAV Testbed to support research into adaptive automation for UAV control.
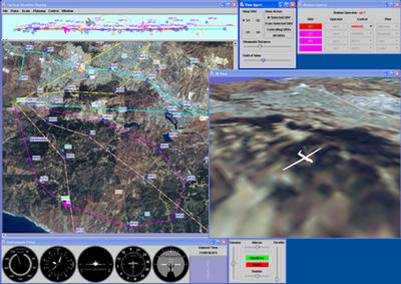
Testbed for Unmanned Supervisory Control (TUSC) was a Phase 1 SBIR performed for Mark Draper (AFRL). For this Phase 1 SBIR, SIFT subcontracted to IATech, who had produced the Multi-Modal Immersive Intelligent Interface for Remote Operation (/MIIIRO/) in a previous SBIR effort. In the Phase 1 SBIR, SIFT and IATech successfully integrated Playbook(R) and MIIIRO. Once again demonstrating the ease with which Playbook can be re-tasked to drive another domain simulation.